近日,我院机器人与智能装备研究所研究团队在王文杰、张莉老师指导下,围绕手术机器人关键技术持续开展深入研究,并在相关方向接连发表多篇高水平学术论文,取得阶段性重要进展。成果列表如下:
1. Jia B, Wang W, Tian X, Wang X. STANet: A Surgical Gesture Recognition Method Based on Spatiotemporal Fusion. Annals of the New York Academy of Sciences.2025;1553(1):502-516. DOI: 10.1111/nyas.70053.
2. Y. Hao, W. Wang,, X. Wang, S. Guo, and Y. Shi,. Enhanced YOLOv10 with Bidirectional Feature Fusion and Dual Attention for Precise Surgical Instrument Detection. The Visual Computer. 2025,41(14): 12351-12365, DOI:10.1007/s00371-025-04161-8.
3. Guo G , Zhang L , Shi J ,Jia B, Wang W.ToolH-YOLO: A Hybrid Feature Fusion Framework for Occlusion-Robust Surgical Instrument Detection. IEEE Sensors Journal, 2025, 25(20):14.DOI:10.1109/JSEN.2025.3608705.
该系列成果的第一作者分别为2023级研究生贾博强(论文1)、2024级研究生郝颖(论文2)以及2023级研究生郭冠群(论文3)。三位同学入学后主动融入导师科研团队,围绕机器人感知与智能控制方向开展系统科研训练,并参与省自然科学基础研究计划重点项目(前沿探索项目-需求牵引类,2025JC-QYXQ-041)研究。在导师指导与课题组协作支持下,他们在完成研究生课程学习的同时,持续推进实验与算法验证,形成了系统的研究思路与工程实现能力,学业表现扎实、科研进展稳定。
成果简介:
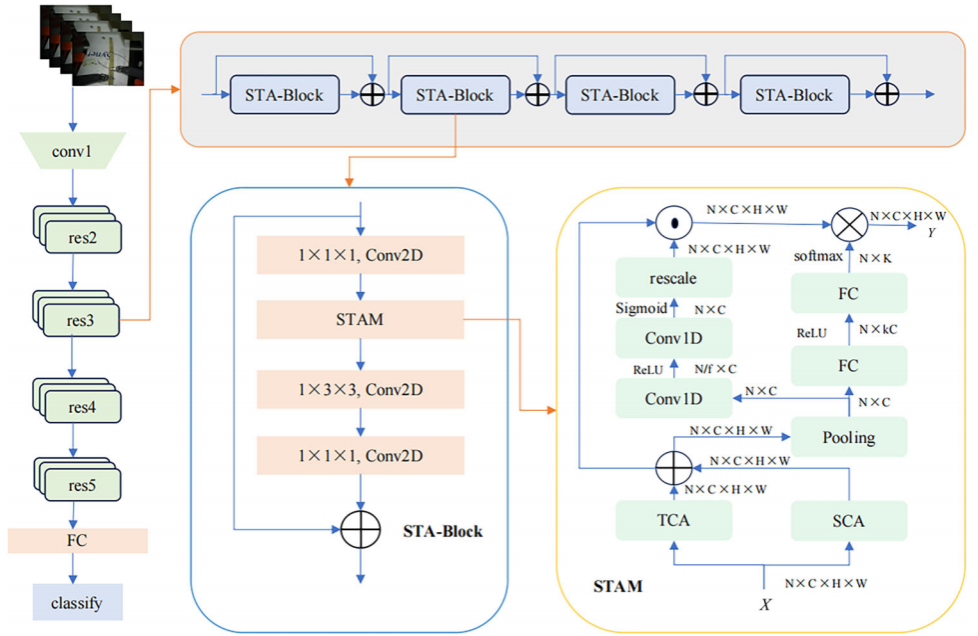
论文1“STANet: A Surgical Gesture Recognition Method Based on Spatiotemporal Fusion.”面向机器人手术中的手术动作(gesture)精准识别需求,提出时空自适应网络 STANet,将时间特征建模与空间表征学习协同融合,并通过时间自适应卷积进一步强化对动作序列长短期依赖的刻画,从而提升复杂手术动作序列的时序建模与识别效果。该方法在公开数据集 JIGSAWS 与 RARP-45 上验证有效,可为手术质量评估、智能辅助识别及视觉反馈系统提供关键算法支撑。
论文2 “Enhanced YOLOv10 with Bidirectional Feature Fusion and Dual Attention for Precise Surgical Instrument Detection.” 聚焦器械检测与位姿信息获取:论文聚焦机器人辅助手术中腹腔镜器械的实时检测与位姿信息获取场景,提出改进框架 YOLOv10-BFDA:通过双向特征融合促进多尺度特征交互,并在骨干网络中引入通道注意力与像素注意力以突出细粒度关键信息,同时结合自适应多尺度注意模块动态加权不同层级特征,增强多目标、多尺度条件下的检测稳定性与精度。实验在 M2CAI16-Tool-Locations 数据集上取得 96.5% mAP@0.5、62.9% mAP@0.5:0.95 的结果,体现了其面向低延迟临床应用的潜力。

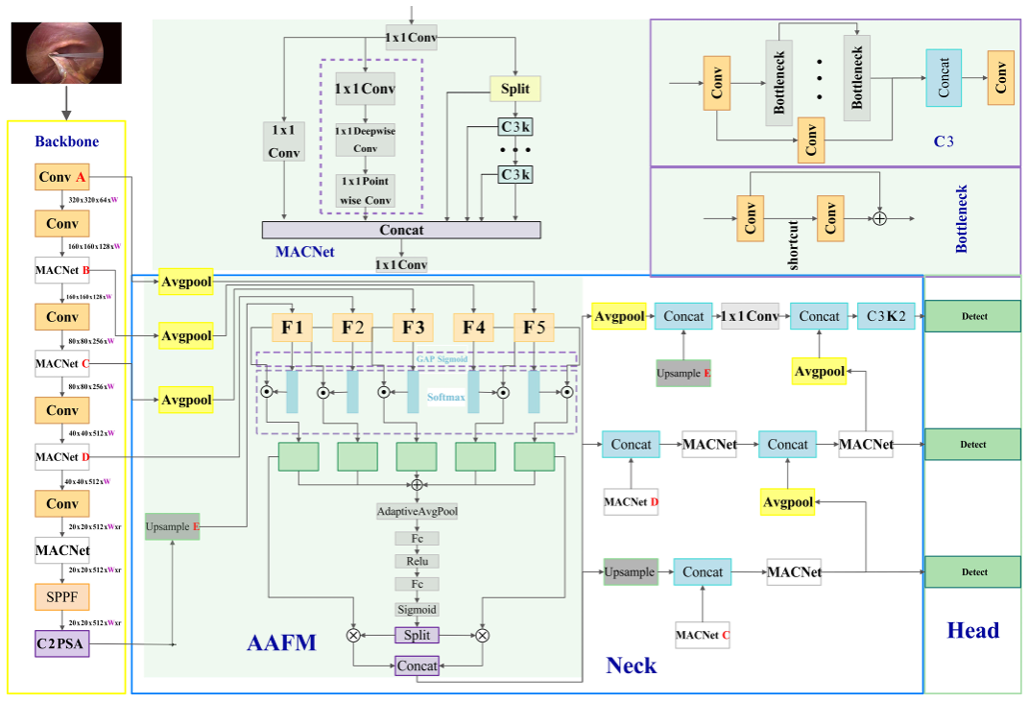
论文3 “ToolH-YOLO: A Hybrid Feature Fusion Framework for Occlusion-Robust Surgical Instrument Detection.”针对腹腔镜场景中常见的遮挡、血液污染与烟雾干扰导致的检测性能退化问题,提出遮挡鲁棒检测框架 ToolH-YOLO:构建 MACNet 以增强多分支深度聚合的特征表达能力,并设计 AAFM 进行多尺度自适应注意融合,从而提升复杂背景与遮挡条件下的定位与识别鲁棒性。实验表明,该方法在 M2CAI16-Tool-Locations 上达到 97.2% mAP@0.5,并在遮挡更强的数据集与 COCO2017 上进一步验证了性能提升与跨域泛化能力。
该系列成果体现了米兰·(milan)中国在智能信息处理关键技术及其在手术机器人、人机交互与医疗健康等领域应用方面的阶段性成效,彰显了学院推进医工交叉科研创新与人才培养的综合能力。学院将持续完善科研平台建设,引入前沿技术资源,进一步强化对学生学术研究与工程实践的支撑,推动产出更多高水平成果。
